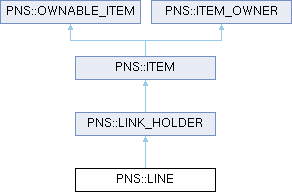
Represents a track on a PCB, connecting two non-trivial joints (that is, vias, pads, junctions between multiple traces or two traces different widths and combinations of these). More...
#include <pns_line.h>
Public Types | |
| enum | PnsKind { INVALID_T = 0 , SOLID_T = 1 , LINE_T = 2 , JOINT_T = 4 , SEGMENT_T = 8 , ARC_T = 16 , VIA_T = 32 , DIFF_PAIR_T = 64 , HOLE_T = 128 , ANY_T = 0xffff , LINKED_ITEM_MASK_T = SOLID_T | SEGMENT_T | ARC_T | VIA_T | HOLE_T } |
| < Supported item types More... | |
Public Member Functions | |
| LINE () | |
| Makes an empty line. | |
| LINE (const LINE &aOther) | |
| LINE (const LINE &aBase, const SHAPE_LINE_CHAIN &aLine) | |
| Copy properties (net, layers, etc.) from a base line and replaces the shape by another. | |
| LINE (VIA *aVia) | |
| Construct a LINE for a lone VIA (ie a stitching via). | |
| ~LINE () | |
| virtual LINE * | Clone () const override |
| Return a deep copy of the item. | |
| LINE & | operator= (const LINE &aOther) |
| LINE & | operator= (LINE &&aOther) noexcept |
| bool | IsLinkedChecked () const |
| Assign a shape to the line (a polyline/line chain). | |
| void | SetShape (const SHAPE_LINE_CHAIN &aLine) |
| Return the shape of the line. | |
| const SHAPE * | Shape (int aLayer) const override |
| Modifiable accessor to the underlying shape. | |
| SHAPE_LINE_CHAIN & | Line () |
| const SHAPE_LINE_CHAIN & | CLine () const |
| int | SegmentCount () const |
| int | PointCount () const |
| int | ArcCount () const |
| int | ShapeCount () const |
| Return the aIdx-th point of the line. | |
| const VECTOR2I & | CPoint (int aIdx) const |
| const VECTOR2I & | CLastPoint () const |
| const SEG | CSegment (int aIdx) const |
| Set line width. | |
| void | SetWidth (int aWidth) |
| Return line width. | |
| int | Width () const |
| Return true if the line is geometrically identical as line aOther. | |
| bool | CompareGeometry (const LINE &aOther) |
| Reverse the point/vertex order. | |
| void | Reverse () |
| Clip the line to the nearest obstacle, traversing from the line's start vertex (0). | |
| const LINE | ClipToNearestObstacle (NODE *aNode) const |
| Clip the line to a given range of vertices. | |
| void | ClipVertexRange (int aStart, int aEnd) |
| Return the number of corners of angles specified by mask aAngles. | |
| int | CountCorners (int aAngles) const |
| bool | Walkaround (SHAPE_LINE_CHAIN aObstacle, SHAPE_LINE_CHAIN &aPre, SHAPE_LINE_CHAIN &aWalk, SHAPE_LINE_CHAIN &aPost, bool aCw) const |
| Calculate a line tightly wrapping a convex hull of an obstacle object (aObstacle). | |
| bool | Walkaround (const SHAPE_LINE_CHAIN &aObstacle, SHAPE_LINE_CHAIN &aPath, bool aCw) const |
| Print out all linked segments. | |
| void | ShowLinks () const |
| bool | EndsWithVia () const |
| int | FindSegment (const SEGMENT *aSeg) const |
| void | AppendVia (const VIA &aVia) |
| void | LinkVia (VIA *aVia) |
| void | RemoveVia () |
| VIA & | Via () |
| const VIA & | Via () const |
| void | SetViaDiameter (int aDiameter) |
| void | SetViaDrill (int aDrill) |
| virtual void | Mark (int aMarker) const override |
| virtual void | Unmark (int aMarker=-1) const override |
| virtual int | Marker () const override |
| virtual VECTOR2I | Anchor (int n) const override |
| virtual int | AnchorCount () const override |
| void | SetBlockingObstacle (ITEM *aObstacle) |
| ITEM * | GetBlockingObstacle () const |
| void | DragSegment (const VECTOR2I &aP, int aIndex, bool aFreeAngle=false) |
| void | DragCorner (const VECTOR2I &aP, int aIndex, bool aFreeAngle=false, DIRECTION_45 aPreferredEndingDirection=DIRECTION_45()) |
| void | DragArc (const VECTOR2I &aP, int aIndex) |
| void | SetRank (int aRank) override |
| int | Rank () const override |
| bool | HasLoops () const |
| bool | HasLockedSegments () const |
| void | Clear () |
| OPT_BOX2I | ChangedArea (const LINE *aOther) const |
| void | SetSnapThreshhold (int aThreshhold) |
| int | GetSnapThreshhold () const |
| void | Link (LINKED_ITEM *aLink) |
| void | Unlink (const LINKED_ITEM *aLink) |
| Return the list of links from the owning node that constitute this line (or NULL if the line is not linked). | |
| std::vector< LINKED_ITEM * > & | Links () |
| const std::vector< LINKED_ITEM * > & | Links () const |
| bool | IsLinked () const |
| Check if the segment aLink is a part of the line. | |
| bool | ContainsLink (const LINKED_ITEM *aItem) const |
| LINKED_ITEM * | GetLink (int aIndex) const |
| Erase the linking information. Used to detach the line from the owning node. | |
| virtual void | ClearLinks () |
| Return the number of segments that were assembled together to form this line. | |
| int | LinkCount () const |
| virtual const SHAPE_LINE_CHAIN | Hull (int aClearance=0, int aWalkaroundThickness=0, int aLayer=-1) const |
| PnsKind | Kind () const |
| Return the type (kind) of the item. | |
| bool | OfKind (int aKindMask) const |
| std::string | KindStr () const |
| void | SetParent (BOARD_ITEM *aParent) |
| BOARD_ITEM * | Parent () const |
| void | SetSourceItem (BOARD_ITEM *aSourceItem) |
| BOARD_ITEM * | GetSourceItem () const |
| virtual BOARD_ITEM * | BoardItem () const |
| void | SetNet (NET_HANDLE aNet) |
| virtual NET_HANDLE | Net () const |
| const PNS_LAYER_RANGE & | Layers () const |
| void | SetLayers (const PNS_LAYER_RANGE &aLayers) |
| void | SetLayer (int aLayer) |
| virtual int | Layer () const |
| bool | LayersOverlap (const ITEM *aOther) const |
| Return true if the set of layers spanned by aOther overlaps our layers. | |
| bool | Collide (const ITEM *aHead, const NODE *aNode, int aLayer, COLLISION_SEARCH_CONTEXT *aCtx=nullptr) const |
| Check for a collision (clearance violation) with between us and item aOther. | |
| virtual std::vector< int > | UniqueShapeLayers () const |
| Return a list of layers that have unique (potentially different) shapes. | |
| virtual bool | HasUniqueShapeLayers () const |
| std::set< int > | RelevantShapeLayers (const ITEM *aOther) const |
| Returns the set of layers on which either this or the other item can have a unique shape. | |
| bool | IsLocked () const |
| void | SetRoutable (bool aRoutable) |
| bool | IsRoutable () const |
| void | SetIsFreePad (bool aIsFreePad=true) |
| bool | IsFreePad () const |
| virtual ITEM * | ParentPadVia () const |
| bool | IsVirtual () const |
| void | SetIsCompoundShapePrimitive () |
| bool | IsCompoundShapePrimitive () const |
| virtual bool | HasHole () const |
| virtual HOLE * | Hole () const |
| virtual void | SetHole (HOLE *aHole) |
| virtual const std::string | Format () const |
| virtual const NODE * | OwningNode () const |
| const ITEM_OWNER * | Owner () const |
| Return the owner of this item, or NULL if there's none. | |
| void | SetOwner (const ITEM_OWNER *aOwner) |
| Set the node that owns this item. | |
| bool | BelongsTo (const ITEM_OWNER *aNode) const |
Static Public Member Functions | |
| static bool | ClassOf (const ITEM *aItem) |
Protected Member Functions | |
| void | copyLinks (const LINK_HOLDER *aParent) |
| < Copy m_links from the line aParent. | |
Protected Attributes | |
| std::vector< LINKED_ITEM * > | m_links |
| PnsKind | m_kind |
| BOARD_ITEM * | m_parent |
| BOARD_ITEM * | m_sourceItem |
| PNS_LAYER_RANGE | m_layers |
| bool | m_movable |
| NET_HANDLE | m_net |
| int | m_marker |
| int | m_rank |
| bool | m_routable |
| bool | m_isVirtual |
| bool | m_isFreePad |
| bool | m_isCompoundShapePrimitive |
| const ITEM_OWNER * | m_owner |
Private Member Functions | |
| void | dragSegment45 (const VECTOR2I &aP, int aIndex) |
| void | dragCorner45 (const VECTOR2I &aP, int aIndex, DIRECTION_45 aPreferredEndingDirection) |
| void | dragSegmentFree (const VECTOR2I &aP, int aIndex) |
| void | dragCornerFree (const VECTOR2I &aP, int aIndex) |
| VECTOR2I | snapToNeighbourSegments (const SHAPE_LINE_CHAIN &aPath, const VECTOR2I &aP, int aIndex) const |
| VECTOR2I | snapDraggedCorner (const SHAPE_LINE_CHAIN &aPath, const VECTOR2I &aP, int aIndex) const |
| bool | collideSimple (const ITEM *aHead, const NODE *aNode, int aLayer, COLLISION_SEARCH_CONTEXT *aCtx) const |
Private Attributes | |
| SHAPE_LINE_CHAIN | m_line |
| The actual shape of the line. | |
| int | m_width |
| Our width. | |
| int | m_snapThreshhold |
| Width to smooth out jagged segments. | |
| VIA * | m_via |
| ITEM * | m_blockingObstacle |
| For mark obstacle mode. | |
Detailed Description
Represents a track on a PCB, connecting two non-trivial joints (that is, vias, pads, junctions between multiple traces or two traces different widths and combinations of these).
PNS_LINEs are NOT stored in the model (NODE). Instead, they are assembled on-the-fly, based on a via/pad/segment that belongs to/starts/ends them.
PNS_LINEs can be either loose (consisting of segments that do not belong to any NODE) or owned (with segments taken from a NODE) - these are returned by NODE::AssembleLine and friends.
A LINE may have a VIA attached at its end (i.e. the last point) - this is used by via dragging/force propagation stuff.
Definition at line 61 of file pns_line.h.
Member Enumeration Documentation
◆ PnsKind
|
inherited |
< Supported item types
| Enumerator | |
|---|---|
| INVALID_T | |
| SOLID_T | |
| LINE_T | |
| JOINT_T | |
| SEGMENT_T | |
| ARC_T | |
| VIA_T | |
| DIFF_PAIR_T | |
| HOLE_T | |
| ANY_T | |
| LINKED_ITEM_MASK_T | |
Definition at line 101 of file pns_item.h.
Constructor & Destructor Documentation
◆ LINE() [1/4]
|
inline |
Makes an empty line.
Definition at line 67 of file pns_line.h.
References PNS::ITEM::LINE_T, PNS::LINK_HOLDER::LINK_HOLDER(), m_blockingObstacle, m_snapThreshhold, m_via, and m_width.
Referenced by ChangedArea(), ClipToNearestObstacle(), Clone(), CompareGeometry(), LINE(), LINE(), operator=(), and operator=().
◆ LINE() [2/4]
| LINE::LINE | ( | const LINE & | aOther | ) |
Definition at line 42 of file pns_line.cpp.
References LINE(), PNS::LINK_HOLDER::LINK_HOLDER(), PNS::ITEM::m_layers, m_line, PNS::ITEM::m_movable, PNS::ITEM::m_net, m_snapThreshhold, m_via, and m_width.
◆ LINE() [3/4]
|
inline |
Copy properties (net, layers, etc.) from a base line and replaces the shape by another.
Definition at line 81 of file pns_line.h.
References LINE(), PNS::LINK_HOLDER::LINK_HOLDER(), m_blockingObstacle, PNS::ITEM::m_layers, m_line, PNS::ITEM::m_net, m_snapThreshhold, m_via, and m_width.
◆ LINE() [4/4]
|
inline |
Construct a LINE for a lone VIA (ie a stitching via).
Definition at line 96 of file pns_line.h.
References PNS::VIA::Diameter(), PNS::ITEM::Layers(), PNS::ITEM::LINE_T, PNS::LINK_HOLDER::LINK_HOLDER(), m_blockingObstacle, PNS::ITEM::m_layers, PNS::ITEM::m_net, PNS::ITEM::m_rank, m_snapThreshhold, m_via, m_width, PNS::ITEM::Net(), PNS::ITEM::Rank(), and PNS_LAYER_RANGE::Start().
◆ ~LINE()
| LINE::~LINE | ( | ) |
Member Function Documentation
◆ Anchor()
|
inlineoverridevirtual |
◆ AnchorCount()
|
inlineoverridevirtual |
◆ AppendVia()
| void LINE::AppendVia | ( | const VIA & | aVia | ) |
Definition at line 1366 of file pns_line.cpp.
References AppendVia(), PNS::VIA::Clone(), m_line, PNS::ITEM::m_net, m_via, PNS::VIA::Pos(), and Reverse().
Referenced by AppendVia(), PNS::LINE_PLACER::buildInitialLine(), PNS::SHOVE::onReverseCollidingVia(), PNS::LINE_PLACER::rhShoveOnly(), PNS::LINE_PLACER::rhWalkBase(), PNS::LINE_PLACER::rhWalkOnly(), PNS::SHOVE::ShoveObstacleLine(), and PNS::DIFF_PAIR::updateLine().
◆ ArcCount()
|
inline |
Definition at line 146 of file pns_line.h.
References m_line.
Referenced by PNS::OPTIMIZER::Optimize().
◆ BelongsTo()
|
inlineinherited |
- Returns
- true if the item is owned by the node aNode.
Definition at line 82 of file pns_item.h.
References m_owner.
Referenced by PNS::NODE::addSolid(), PNS::NODE::addVia(), PNS::NODE::doRemove(), PNS::LINE::operator=(), PNS::NODE::Remove(), and PNS::NODE::~NODE().
◆ BoardItem()
|
inlinevirtualinherited |
- Returns
- the BOARD_ITEM, even if it's not the direct parent.
Reimplemented in PNS::HOLE.
Definition at line 207 of file pns_item.h.
References m_parent.
Referenced by DIFF_PHASE_SKEW_TOOL::buildLengthDelayItems(), isEdge(), isEdge(), PNS_PCBNEW_RULE_RESOLVER::IsInNetTie(), PNS_PCBNEW_RULE_RESOLVER::IsNetTieExclusion(), TEMP_CLEARANCE_CACHE_KEY::makeSide(), PNS_PCBNEW_RULE_RESOLVER::QueryConstraint(), and ROUTER_PREVIEW_ITEM::ROUTER_PREVIEW_ITEM().
◆ ChangedArea()
Definition at line 1497 of file pns_line.cpp.
References ChangedArea(), SEG::Contains(), SHAPE_LINE_CHAIN::CPoint(), SHAPE_LINE_CHAIN::CSegment(), PNS::extendBox(), BOX2< Vec >::Inflate(), LINE(), m_line, SHAPE_LINE_CHAIN::PointCount(), SHAPE_LINE_CHAIN::Simplify(), and Width().
Referenced by PNS::ChangedArea(), PNS::ChangedArea(), ChangedArea(), and PNS::DRAGGER::optimizeAndUpdateDraggedLine().
◆ ClassOf()
|
inlinestatic |
Definition at line 111 of file pns_line.h.
References PNS::ITEM::Kind(), and PNS::ITEM::LINE_T.
◆ CLastPoint()
|
inline |
Definition at line 151 of file pns_line.h.
References m_line.
Referenced by PNS::TOPOLOGY::AssembleTuningPath(), PNS::MULTI_DRAGGER::Drag(), PNS::OPTIMIZER::fanoutCleanup(), PNS::NODE::FindLineEnds(), PNS::TOPOLOGY::followBranch(), PNS::TOPOLOGY::followTrivialPath(), PNS::TOPOLOGY::LeadingRatLine(), PNS::TOPOLOGY::NearestUnconnectedAnchorPoint(), PNS::LINE_PLACER::rhShoveOnly(), PNS::LINE_PLACER::rhWalkBase(), PNS::LINE_PLACER::rhWalkOnly(), PNS::WALKAROUND::Route(), PNS::SHOVE::Run(), PNS::SHOVE::sanityCheck(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), PNS::LINE_PLACER::splitHeadTail(), Walkaround(), and PNS::TOPOLOGY::walkTuningPath().
◆ Clear()
| void LINE::Clear | ( | ) |
Definition at line 1589 of file pns_line.cpp.
References Clear(), PNS::LINK_HOLDER::ClearLinks(), m_line, and RemoveVia().
Referenced by Clear(), PNS::LINE_PLACER::rhWalkBase(), and PNS::LINE_PLACER::splitHeadTail().
◆ ClearLinks()
|
inlinevirtualinherited |
Return the number of segments that were assembled together to form this line.
Reimplemented in PNS::DIFF_PAIR.
Definition at line 89 of file pns_link_holder.h.
References m_links.
Referenced by PNS::LINE::Clear(), PNS::COMPONENT_DRAGGER::Drag(), PNS::MULTI_DRAGGER::Drag(), PNS::DRAGGER::dragMarkObstacles(), PNS::DRAGGER::dragShove(), PNS::DRAGGER::dragViaMarkObstacles(), PNS::DRAGGER::dragViaWalkaround(), PNS::MULTI_DRAGGER::multidragShove(), PNS::TOPOLOGY::NearestUnconnectedAnchorPoint(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onReverseCollidingVia(), PNS::OPTIMIZER::Optimize(), PNS::DRAGGER::optimizeAndUpdateDraggedLine(), PNS::SHOVE::preShoveCleanup(), PNS::NODE::Remove(), PNS::LINE_PLACER::removeLoops(), and PNS::SHOVE::ShoveObstacleLine().
◆ CLine()
|
inline |
Definition at line 142 of file pns_line.h.
References m_line.
Referenced by PNS::COST_ESTIMATOR::Add(), PNS::TOPOLOGY::AssembleTrivialPath(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::DIFF_PAIR_PLACER::attemptWalk(), BOOST_AUTO_TEST_CASE(), BOOST_AUTO_TEST_CASE(), PNS::KEEP_TOPOLOGY_CONSTRAINT::Check(), PNS::NODE::CheckColliding(), PNS::SHOVE::checkShoveDirection(), PNS::clipToOtherLine(), PNS::COST_ESTIMATOR::CornerCost(), PNS::DIFF_PAIR::DIFF_PAIR(), PNS::DRAGGER::dragShove(), PNS::DRAGGER::dragViaMarkObstacles(), PNS::DRAGGER::dragViaWalkaround(), PNS::DRAGGER::dragWalkaround(), PNS::OPTIMIZER::fanoutCleanup(), PNS::NODE::FindLinesBetweenJoints(), PNS::LINE_PLACER::FixRoute(), PNS::TOPOLOGY::followBranch(), PNS::TOPOLOGY::followTrivialPath(), getPNSLine(), PCB_TUNING_PATTERN::initBaseLine(), PNS::LINE_PLACER::Move(), PNS::MULTI_DRAGGER::multidragWalkaround(), PNS::NODE::NearestObstacle(), PNS::SHOVE::onCollidingArc(), PNS::SHOVE::onReverseCollidingVia(), PNS::DRAGGER::optimizeAndUpdateDraggedLine(), PNS::LINE_PLACER::optimizeTailHeadTransition(), PNS::SHOVE::patchTadpoleVia(), PNS::SHOVE::preShoveCleanup(), PNS_PCBNEW_RULE_RESOLVER::QueryConstraint(), PNS::COST_ESTIMATOR::Remove(), PNS::LINE_PLACER::removeLoops(), PNS::COST_ESTIMATOR::Replace(), PNS_LOG_PLAYER::ReplayLog(), PNS::DIFF_PAIR_PLACER::rhShoveOnly(), PNS::LINE_PLACER::rhWalkBase(), PNS::WALKAROUND::Route(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), PNS::TOPOLOGY::SimplifyLine(), PNS::LINE_PLACER::simplifyNewLine(), PNS::WALKAROUND::singleStep(), PNS::OPTIMIZER::smartPadsSingle(), PNS::LINE_PLACER::splitHeadTail(), PNS::COMPONENT_DRAGGER::Start(), PNS::DRAGGER::startDragArc(), PNS::Tighten(), PNS::LINE_PLACER::updatePStart(), Walkaround(), and PNS::TOPOLOGY::walkTuningPath().
◆ ClipToNearestObstacle()
Clip the line to a given range of vertices.
Definition at line 631 of file pns_line.cpp.
References SHAPE_LINE_CHAIN::Clear(), ClipToNearestObstacle(), SHAPE_LINE_CHAIN::CSegment(), SHAPE_LINE_CHAIN::IsArcSegment(), LINE(), Line(), PNS::NODE::NearestObstacle(), SEG::NearestPoint(), SHAPE_LINE_CHAIN::NearestSegment(), SHAPE_LINE_CHAIN::Remove(), RemoveVia(), and SHAPE_LINE_CHAIN::Split().
Referenced by ClipToNearestObstacle().
◆ ClipVertexRange()
| void LINE::ClipVertexRange | ( | int | aStart, |
| int | aEnd ) |
Return the number of corners of angles specified by mask aAngles.
We need to figure out which joints to keep after the clip operation, because arcs will have multiple vertices. It is assumed that anything calling this method will have determined the vertex range to clip based on joints, meaning we will never clip in the middle of an arc. Clipping in the middle of an arc would break this and various other things...
Definition at line 1421 of file pns_line.cpp.
References ClipVertexRange(), PNS::LINK_HOLDER::IsLinked(), m_line, and PNS::LINK_HOLDER::m_links.
Referenced by ClipVertexRange(), and PNS::NODE::FindLinesBetweenJoints().
◆ Clone()
|
overridevirtual |
Return a deep copy of the item.
Implements PNS::ITEM.
Definition at line 166 of file pns_line.cpp.
References Clone(), LINE, and LINE().
Referenced by PNS::ITEM_SET::Add(), Clone(), PNS::ITEM_SET::Prepend(), PNS::SHOVE::replaceLine(), and PNS::SHOVE::touchRootLine().
◆ Collide()
|
inherited |
Check for a collision (clearance violation) with between us and item aOther.
Collision checking takes all PCB stuff into account (layers, nets, DRC rules). Optionally returns a minimum translation vector for force propagation algorithm.
- Parameters
-
aOther is the item to check collision against.
- Returns
- true, if a collision was found.
Definition at line 305 of file pns_item.cpp.
References collideSimple(), and ITEM().
Referenced by BOOST_FIXTURE_TEST_CASE(), PNS::clipToOtherLine(), PNS::SHOVE::fixupViaCollisions(), PNS::SHOVE::onCollidingSolid(), PNS::NODE::DEFAULT_OBSTACLE_VISITOR::operator()(), PNS::OPTIMIZER::CACHE_VISITOR::operator()(), PNS::SHOVE::shoveIteration(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::COMPONENT_DRAGGER::Start(), and PNS::verifyDpBypass().
◆ collideSimple()
|
privateinherited |
Definition at line 104 of file pns_item.cpp.
References actual, clearance, SHAPE::Collide(), collideSimple(), dyn_cast(), Edge_Cuts, PNS::NODE::GetClearance(), PNS::ROUTER::GetInstance(), PNS::ROUTER::GetInterface(), PNS::NODE::GetRuleResolver(), HasHole(), PNS::RULE_RESOLVER::HasUserDefinedPhysicalConstraint(), Hole(), HOLE_T, PNS::ROUTER_IFACE::IsFlashedOnLayer(), IsFreePad(), PNS::RULE_RESOLVER::IsInNetTie(), PNS::RULE_RESOLVER::IsKeepout(), PNS::RULE_RESOLVER::IsNetTieExclusion(), PNS::RULE_RESOLVER::IsNonPlatedSlot(), ITEM(), Kind(), Layers(), LINE_T, PNS::OBSTACLE::m_clearance, PNS::COLLISION_SEARCH_OPTIONS::m_differentNetsOnly, PNS::OBSTACLE::m_distFirst, PNS::OBSTACLE::m_head, PNS::OBSTACLE::m_item, m_kind, m_layers, PNS::OBSTACLE::m_maxFanoutWidth, PNS::COLLISION_SEARCH_OPTIONS::m_overrideClearance, m_parent, PNS::COLLISION_SEARCH_OPTIONS::m_useClearanceEpsilon, PNS::HOLE::Net(), Net(), PNS::COLLISION_SEARCH_CONTEXT::obstacles, PNS::COLLISION_SEARCH_CONTEXT::options, PNS::NODE::QueryEdgeExclusions(), Shape(), and PNS::shouldWeConsiderHoleCollisions().
Referenced by Collide(), and collideSimple().
◆ CompareGeometry()
| bool LINE::CompareGeometry | ( | const LINE & | aOther | ) |
Reverse the point/vertex order.
Definition at line 1352 of file pns_line.cpp.
References CompareGeometry(), LINE(), and m_line.
Referenced by CompareGeometry().
◆ ContainsLink()
|
inlineinherited |
Definition at line 75 of file pns_link_holder.h.
References alg::contains(), and m_links.
Referenced by PNS::NODE::Add(), PNS::TOOL_BASE::checkSnap(), PCB_TUNING_PATTERN::initBaseLine(), and PNS::LINE::RemoveVia().
◆ copyLinks()
|
inlineprotectedinherited |
< Copy m_links from the line aParent.
List of segments in the owning NODE (ITEM::m_owner) that constitute this line, or NULL if the line is not a part of any node.
Definition at line 118 of file pns_link_holder.h.
References LINK_HOLDER(), and m_links.
Referenced by PNS::LINE::operator=().
◆ CountCorners()
| int LINE::CountCorners | ( | int | aAngles | ) | const |
Definition at line 218 of file pns_line.cpp.
References DIRECTION_45::Angle(), CountCorners(), and m_line.
Referenced by PNS::CORNER_COUNT_LIMIT_CONSTRAINT::Check(), CountCorners(), PNS::OPTIMIZER::Optimize(), and PNS::OPTIMIZER::smartPadsSingle().
◆ CPoint()
|
inline |
Definition at line 150 of file pns_line.h.
References m_line.
Referenced by PNS::TOPOLOGY::AssembleTuningPath(), PNS::SHOVE::checkShoveDirection(), PNS::OPTIMIZER::fanoutCleanup(), PNS::NODE::FindLineEnds(), PNS::TOPOLOGY::followBranch(), PNS::TOPOLOGY::followTrivialPath(), PNS::getDanglingAnchor(), HasLoops(), PNS::WALKAROUND::Route(), PNS::SHOVE::Run(), PNS::SHOVE::sanityCheck(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), PNS::LINE_PLACER::splitHeadTail(), and PNS::TOPOLOGY::walkTuningPath().
◆ CSegment()
|
inline |
Set line width.
Definition at line 152 of file pns_line.h.
References m_line.
Referenced by PNS::DIFF_PAIR::EndingPrimitives(), PNS::MULTI_DRAGGER::findNewLeaderSegment(), PNS::LINE_PLACER::FixRoute(), PNS::OPTIMIZER::mergeStep(), PNS::LINE_PLACER::optimizeTailHeadTransition(), and PNS::SHOVE::ShoveObstacleLine().
◆ DragArc()
| void LINE::DragArc | ( | const VECTOR2I & | aP, |
| int | aIndex ) |
Definition at line 863 of file pns_line.cpp.
References SEG::A, std::abs(), anchor, SHAPE_LINE_CHAIN::Append(), SEG::B, CalcArcMid(), CIRCLE::Center, center, CIRCLE::ConstructFromTanTanPt(), cursor, DragArc(), VECTOR2< T >::EuclideanNorm(), SHAPE_ARC::GetArcMid(), SHAPE_ARC::GetCenter(), ADVANCED_CFG::GetCfg(), SHAPE_ARC::GetP0(), SHAPE_ARC::GetP1(), SHAPE_ARC::GetWidth(), SEG::IntersectLines(), KiROUND(), SEG::LineProject(), m_line, ADVANCED_CFG::m_MaxTangentAngleDeviation, M_PI, CIRCLE::NearestPoint(), SEG::NearestPoint(), pcbIUScale, CIRCLE::Radius, SHAPE_LINE_CHAIN::SetWidth(), SEG::Side(), VECTOR2< T >::x, and VECTOR2< T >::y.
Referenced by BOOST_AUTO_TEST_CASE(), BOOST_AUTO_TEST_CASE(), DragArc(), PNS::DRAGGER::dragMarkObstacles(), PNS::DRAGGER::dragShove(), and PNS::DRAGGER::dragWalkaround().
◆ DragCorner()
| void LINE::DragCorner | ( | const VECTOR2I & | aP, |
| int | aIndex, | ||
| bool | aFreeAngle = false, | ||
| DIRECTION_45 | aPreferredEndingDirection = DIRECTION_45() ) |
Definition at line 836 of file pns_line.cpp.
References DragCorner(), dragCorner45(), and dragCornerFree().
Referenced by PNS::COMPONENT_DRAGGER::Drag(), PNS::MULTI_DRAGGER::Drag(), DragCorner(), PNS::DRAGGER::dragMarkObstacles(), PNS::DRAGGER::dragShove(), PNS::DRAGGER::dragViaMarkObstacles(), PNS::DRAGGER::dragViaWalkaround(), and PNS::DRAGGER::dragWalkaround().
◆ dragCorner45()
|
private |
Definition at line 775 of file pns_line.cpp.
References dragCorner45(), PNS::dragCornerInternal(), m_line, path, and snapDraggedCorner().
Referenced by DragCorner(), and dragCorner45().
◆ dragCornerFree()
|
private |
Definition at line 809 of file pns_line.cpp.
References dragCornerFree(), and m_line.
Referenced by DragCorner(), and dragCornerFree().
◆ DragSegment()
| void LINE::DragSegment | ( | const VECTOR2I & | aP, |
| int | aIndex, | ||
| bool | aFreeAngle = false ) |
Definition at line 850 of file pns_line.cpp.
References DragSegment(), and dragSegment45().
Referenced by PNS::DRAGGER::dragMarkObstacles(), DragSegment(), PNS::DRAGGER::dragShove(), and PNS::DRAGGER::dragWalkaround().
◆ dragSegment45()
|
private |
Definition at line 1182 of file pns_line.cpp.
References SEG::A, DIRECTION_45::ANG_HALF_FULL, DIRECTION_45::ANG_OBTUSE, DIRECTION_45::Angle(), SHAPE_LINE_CHAIN::Append(), SEG::B, dragSegment45(), index, SEG::Intersect(), SEG::IntersectLines(), DIRECTION_45::Left(), SHAPE_LINE_CHAIN::Length(), m_line, path, DIRECTION_45::Right(), snapToNeighbourSegments(), DIRECTION_45::ToVector(), and DIRECTION_45::UNDEFINED.
Referenced by DragSegment(), and dragSegment45().
◆ dragSegmentFree()
|
private |
◆ EndsWithVia()
|
inline |
Definition at line 195 of file pns_line.h.
References m_via.
Referenced by PNS::NODE::CheckColliding(), PNS::SHOVE::checkShoveDirection(), PNS::OPTIMIZER::fanoutCleanup(), PNS::LINE_PLACER::FixRoute(), PNS::ROUTER::markViolations(), PNS::ROUTER::movePlacing(), PNS::NODE::NearestObstacle(), PNS::TOPOLOGY::NearestUnconnectedAnchorPoint(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onCollidingVia(), PNS::SHOVE::onReverseCollidingVia(), PNS::SHOVE::patchTadpoleVia(), PNS::SHOVE::replaceLine(), PNS::LINE_PLACER::rhShoveOnly(), PNS::LINE_PLACER::rhWalkBase(), PNS::WALKAROUND::Route(), PNS::SHOVE::Run(), PNS::SHOVE::shoveIteration(), and PNS::SHOVE::ShoveObstacleLine().
◆ FindSegment()
| int LINE::FindSegment | ( | const SEGMENT * | aSeg | ) | const |
Definition at line 1620 of file pns_line.cpp.
References FindSegment(), m_line, and PNS::SEGMENT::Seg().
Referenced by FindSegment().
◆ Format()
|
virtualinherited |
Reimplemented in PNS::SEGMENT, and PNS::VIA.
Definition at line 338 of file pns_item.cpp.
References PNS::ROUTER::GetInstance(), PNS::ROUTER::GetInterface(), PNS::ROUTER_IFACE::GetNetName(), KindStr(), m_layers, and Net().
Referenced by PNS::NODE::Dump(), PNS::SEGMENT::Format(), PNS::VIA::Format(), and PNS::SHOVE::shoveIteration().
◆ GetBlockingObstacle()
|
inline |
Definition at line 235 of file pns_line.h.
References m_blockingObstacle.
Referenced by PNS::ROUTER::markViolations().
◆ GetLink()
|
inlineinherited |
Erase the linking information. Used to detach the line from the owning node.
Definition at line 80 of file pns_link_holder.h.
References m_links.
Referenced by DIFF_PHASE_SKEW_TOOL::getNetPaths(), PNS::LINE_PLACER::removeLoops(), and PNS::TOPOLOGY::SimplifyLine().
◆ GetSnapThreshhold()
|
inline |
Definition at line 257 of file pns_line.h.
References m_snapThreshhold.
◆ GetSourceItem()
|
inlineinherited |
Definition at line 202 of file pns_item.h.
References m_sourceItem.
Referenced by PNS::NODE::AssembleLine(), PNS_KICAD_IFACE::createBoardItem(), PNS_KICAD_IFACE_BASE::GetLengthDelayCalculationItems(), PNS_VIEWER_IFACE::GetLengthDelayCalculationItems(), PNS::VIA::operator=(), PNS::SEGMENT::SEGMENT(), PNS::DP_MEANDER_PLACER::Start(), PNS::MEANDER_PLACER::Start(), and PNS::MEANDER_SKEW_PLACER::Start().
◆ HasHole()
|
inlinevirtualinherited |
Reimplemented in PNS::SOLID, PNS::VIA, and PNS::VVIA.
Definition at line 303 of file pns_item.h.
Referenced by collideSimple(), PNS::NODE::Commit(), PNS::NODE::doRemove(), PNS::SHOVE::getClearance(), PNS::WALKAROUND::RestrictToCluster(), and ROUTER_PREVIEW_ITEM::Update().
◆ HasLockedSegments()
| bool LINE::HasLockedSegments | ( | ) | const |
Definition at line 1578 of file pns_line.cpp.
References HasLockedSegments(), PNS::LINK_HOLDER::m_links, and PNS::MK_LOCKED.
Referenced by HasLockedSegments(), PNS::SHOVE::onCollidingArc(), and PNS::SHOVE::onCollidingSegment().
◆ HasLoops()
| bool LINE::HasLoops | ( | ) | const |
Definition at line 1468 of file pns_line.cpp.
References CPoint(), HasLoops(), and PointCount().
Referenced by HasLoops(), and PNS::SHOVE::onCollidingSolid().
◆ HasUniqueShapeLayers()
|
inlinevirtualinherited |
Reimplemented in PNS::VIA.
Definition at line 252 of file pns_item.h.
Referenced by RelevantShapeLayers().
◆ Hole()
|
inlinevirtualinherited |
Reimplemented in PNS::SOLID, and PNS::VIA.
Definition at line 304 of file pns_item.h.
Referenced by collideSimple(), PNS::NODE::Commit(), PNS::NODE::doRemove(), PNS::SHOVE::getClearance(), PNS::WALKAROUND::RestrictToCluster(), and ROUTER_PREVIEW_ITEM::Update().
◆ Hull()
|
inlinevirtualinherited |
Reimplemented in PNS::ARC, PNS::HOLE, PNS::SEGMENT, PNS::SOLID, and PNS::VIA.
Definition at line 164 of file pns_item.h.
Referenced by PNS::RULE_RESOLVER::HullCache(), and PNS_PCBNEW_RULE_RESOLVER::HullCache().
◆ IsCompoundShapePrimitive()
|
inlineinherited |
Definition at line 301 of file pns_item.h.
References m_isCompoundShapePrimitive.
◆ IsFreePad()
|
inlineinherited |
Definition at line 288 of file pns_item.h.
References m_isFreePad, and ParentPadVia().
Referenced by MOCK_RULE_RESOLVER::Clearance(), PNS_PCBNEW_RULE_RESOLVER::Clearance(), collideSimple(), and TEMP_CLEARANCE_CACHE_KEY::makeSide().
◆ IsLinked()
|
inlineinherited |
Check if the segment aLink is a part of the line.
Definition at line 69 of file pns_link_holder.h.
References m_links.
Referenced by PNS::NODE::Add(), PNS::LINE::ClipVertexRange(), PNS::TOPOLOGY::followTrivialPath(), PNS::LINE::IsLinkedChecked(), PNS::SHOVE::pushLineStack(), PNS::LINE::Rank(), PNS::OPTIMIZER::removeCachedSegments(), ShowLinks(), and PNS::TOPOLOGY::SimplifyLine().
◆ IsLinkedChecked()
|
inline |
Assign a shape to the line (a polyline/line chain).
Definition at line 125 of file pns_line.h.
References PNS::LINK_HOLDER::IsLinked(), PNS::LINK_HOLDER::LinkCount(), and ShapeCount().
◆ IsLocked()
|
inlineinherited |
Definition at line 278 of file pns_item.h.
References Marker(), and PNS::MK_LOCKED.
Referenced by BOOST_FIXTURE_TEST_CASE(), PNS_KICAD_IFACE::createBoardItem(), PNS::JOINT::IsLineCorner(), PNS::JOINT::NextSegment(), and PNS::SHOVE::pushOrShoveVia().
◆ IsRoutable()
|
inlineinherited |
Definition at line 284 of file pns_item.h.
References m_routable.
Referenced by PNS::NODE::addSolid(), and PNS::NODE::removeSolidIndex().
◆ IsVirtual()
|
inlineinherited |
Definition at line 295 of file pns_item.h.
References m_isVirtual.
Referenced by PNS_KICAD_IFACE::DisplayItem(), PNS::NODE::GetClearance(), PNS::JOINT::NextSegment(), and PNS::NODE::QueryColliding().
◆ Kind()
|
inlineinherited |
Return the type (kind) of the item.
Definition at line 173 of file pns_item.h.
References m_kind.
Referenced by PNS::NODE::add(), PNS::TOPOLOGY::AssembleDiffPair(), PNS::NODE::AssembleLine(), PNS::TOPOLOGY::AssembleTrivialPath(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::OPTIMIZER::CacheRemove(), PNS::NODE::CheckColliding(), PNS::ARC::ClassOf(), PNS::DIFF_PAIR::ClassOf(), PNS::LINE::ClassOf(), PNS::SEGMENT::ClassOf(), PNS::SOLID::ClassOf(), PNS::VIA::ClassOf(), collideSimple(), comparePnsItems(), PNS::OPTIMIZER::computeBreakouts(), PNS_KICAD_IFACE::createBoardItem(), PNS::DIFF_PAIR_PLACER::FindDpPrimitivePair(), PNS::NODE::followLine(), PNS::LOGGER::formatRouterItemAsJSON(), PNS_PCBNEW_RULE_RESOLVER::getBoardItem(), PNS::getDanglingAnchor(), PNS::HELPERS::GetSnappedStartPoint(), PNS_KICAD_IFACE_BASE::ImportSizes(), PNS_KICAD_IFACE_BASE::inheritTrackWidth(), TEMP_CLEARANCE_CACHE_KEY::makeSide(), PNS_KICAD_IFACE::modifyBoardItem(), PNS::JOINT::NextSegment(), DIFF_PHASE_SKEW_TOOL::normalisePathItems(), PNS::OPTIMIZER::CACHE_VISITOR::operator()(), PNS::INDEX::Query(), PNS_PCBNEW_RULE_RESOLVER::QueryConstraint(), PNS::NODE::Remove(), PNS::SEGMENT::SEGMENT(), PNS::SHOVE::shoveIteration(), PNS::OPTIMIZER::smartPadsSingle(), PNS::TOOL_BASE::snapToItem(), PNS::DRAGGER::Start(), PNS::LINE_PLACER::Start(), and ROUTER_PREVIEW_ITEM::Update().
◆ KindStr()
|
inherited |
- Returns
- the kind of the item, as string
Definition at line 315 of file pns_item.cpp.
References ARC_T, DIFF_PAIR_T, HOLE_T, JOINT_T, LINE_T, m_kind, SEGMENT_T, SOLID_T, and VIA_T.
Referenced by PNS::TOPOLOGY::AssembleTrivialPath(), PNS::TOPOLOGY::AssembleTuningPath(), Format(), PNS::LOGGER::formatRouterItemAsJSON(), and PNS::TOOL_BASE::pickSingleItem().
◆ Layer()
|
inlinevirtualinherited |
Definition at line 216 of file pns_item.h.
References Layers(), and PNS_LAYER_RANGE::Start().
Referenced by RECOVERED_LAYER_IFACE::AddItem(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::clipToOtherLine(), PNS::OPTIMIZER::fanoutCleanup(), PNS::TOPOLOGY::findLinesFromVia(), PNS::SHOVE::fixupViaCollisions(), PNS::LOGGER::formatRouterItemAsJSON(), PNS_KICAD_IFACE_BASE::GetLengthDelayCalculationItems(), PNS_VIEWER_IFACE::GetLengthDelayCalculationItems(), PNS_KICAD_IFACE_BASE::ImportSizes(), PNS_PCBNEW_RULE_RESOLVER::IsKeepout(), PNS_PCBNEW_RULE_RESOLVER::IsNetTieExclusion(), PNS::ROUTER::markViolations(), PNS::ROUTER::movePlacing(), PNS::NODE::NearestObstacle(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onCollidingVia(), PNS::SHOVE::onReverseCollidingVia(), PNS::OPTIMIZER::runSmartPads(), PNS::SHOVE::shoveIteration(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), PNS::COMPONENT_DRAGGER::Start(), MOCK_PNS_KICAD_IFACE::TestInheritTrackWidth(), and PNS::verifyDpBypass().
◆ Layers()
|
inlineinherited |
Definition at line 212 of file pns_item.h.
References m_layers.
Referenced by PNS::INDEX::Add(), PNS::NODE::Add(), PNS::NODE::addArc(), PNS::NODE::addSegment(), PNS::NODE::addSolid(), PNS::NODE::addVia(), PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::TOPOLOGY::AssembleDiffPair(), PNS::NODE::AssembleLine(), PNS::KEEP_TOPOLOGY_CONSTRAINT::Check(), MOCK_RULE_RESOLVER::Clearance(), PNS_PCBNEW_RULE_RESOLVER::Clearance(), PNS::HOLE::Clone(), PNS::VIA::Clone(), collideSimple(), comparePnsItems(), PNS_KICAD_IFACE::createBoardItem(), PNS::DIFF_PAIR_PLACER::FindDpPrimitivePair(), PNS::NODE::FindJoint(), PNS::NODE::FindLinesBetweenJoints(), PNS::NODE::findRedundantArc(), PNS::NODE::findRedundantArc(), PNS::NODE::findRedundantSegment(), PNS::NODE::findRedundantSegment(), PNS::NODE::FixupVirtualVias(), PNS::LOGGER::formatRouterItemAsJSON(), PNS::ROUTER::GetNearestRatnestAnchor(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), Layer(), LayersOverlap(), PNS::LINE::LINE(), PNS::NODE::LockJoint(), PNS::VIA::MakeHandle(), TEMP_CLEARANCE_CACHE_KEY::makeSide(), PNS::ROUTER::markViolations(), PNS::TOPOLOGY::NearestUnconnectedAnchorPoint(), PNS::JOINT::NextSegment(), PNS::SHOVE::onCollidingSolid(), PNS::VIA::operator=(), PNS::TOOL_BASE::pickSingleItem(), PNS::INDEX::Query(), PNS::INDEX::Remove(), PNS::NODE::removeArcIndex(), PNS::NODE::removeSegmentIndex(), PNS::NODE::removeSolidIndex(), PNS::NODE::removeViaIndex(), PNS_LOG_PLAYER::ReplayLog(), PNS::SEGMENT::SEGMENT(), PNS::SHOVE::shoveIteration(), PNS::COMPONENT_DRAGGER::Start(), PNS::DRAGGER::startDragArc(), ROUTER_PREVIEW_ITEM::Update(), PNS::DIFF_PAIR::updateLine(), and PNS::VIA::VIA().
◆ LayersOverlap()
|
inlineinherited |
Return true if the set of layers spanned by aOther overlaps our layers.
Definition at line 221 of file pns_item.h.
References ITEM(), Layers(), and PNS_LAYER_RANGE::Overlaps().
Referenced by PNS::SHOVE::onCollidingArc(), PNS::SHOVE::onCollidingSegment(), PNS::NODE::rebuildJoint(), and PNS::SHOVE::ShoveObstacleLine().
◆ Line()
|
inline |
Definition at line 141 of file pns_line.h.
References m_line.
Referenced by PNS::NODE::Add(), PNS::NODE::AssembleLine(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::DIFF_PAIR_PLACER::attemptWalk(), BOOST_AUTO_TEST_CASE(), BOOST_AUTO_TEST_CASE(), PNS::CORNER_COUNT_LIMIT_CONSTRAINT::Check(), ClipToNearestObstacle(), PNS::OPTIMIZER::mergeColinear(), PNS::OPTIMIZER::mergeFull(), PNS::OPTIMIZER::mergeObtuse(), PNS::LINE_PLACER::Move(), DIFF_PHASE_SKEW_TOOL::normalisePathItems(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onReverseCollidingVia(), PNS::DRAGGER::optimizeAndUpdateDraggedLine(), PCB_TUNING_PATTERN::recoverBaseline(), PNS::LINE_PLACER::rhWalkBase(), PNS::OPTIMIZER::runSmartPads(), PNS::SHOVE::shoveLineToHullSet(), PNS::WALKAROUND::singleStep(), and PNS::LINE_PLACER::splitHeadTail().
◆ Link()
|
inlineinherited |
Definition at line 46 of file pns_link_holder.h.
References alg::contains(), and m_links.
Referenced by PNS::NODE::Add(), PNS::NODE::AssembleLine(), and PNS::LINE::LinkVia().
◆ LinkCount()
|
inlineinherited |
Definition at line 95 of file pns_link_holder.h.
References m_links.
Referenced by PNS::LINE::IsLinkedChecked(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::pruneLineFromOptimizerQueue(), PNS::LINE_PLACER::removeLoops(), PNS::SHOVE::Run(), and PNS::SHOVE::runOptimizer().
◆ Links() [1/2]
|
inlineinherited |
Definition at line 66 of file pns_link_holder.h.
References m_links.
Referenced by PNS::TOPOLOGY::AssembleDiffPair(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::TOPOLOGY::findLinesFromVia(), PNS::SHOVE::findRootLine(), PNS::TOPOLOGY::followBranch(), PNS::TOPOLOGY::followTrivialPath(), PNS::SHOVE::pruneLineFromOptimizerQueue(), PNS::NODE::Remove(), PNS::NODE::Remove(), PNS::OPTIMIZER::removeCachedSegments(), PNS::removeHead(), PCB_TUNING_PATTERN::removeToBaseline(), PNS::SHOVE::replaceLine(), PNS::COMPONENT_DRAGGER::Start(), PNS::SHOVE::touchRootLine(), PNS::SHOVE::unwindLineStack(), and PNS::TOPOLOGY::walkTuningPath().
◆ Links() [2/2]
|
inlineinherited |
Definition at line 67 of file pns_link_holder.h.
References m_links.
◆ LinkVia()
| void LINE::LinkVia | ( | VIA * | aVia | ) |
Definition at line 1379 of file pns_line.cpp.
References PNS::LINK_HOLDER::Link(), LinkVia(), m_line, m_via, PNS::VIA::Pos(), and Reverse().
Referenced by LinkVia(), PNS::SHOVE::patchTadpoleVia(), PNS::SHOVE::pushOrShoveVia(), and PNS::SHOVE::Run().
◆ Mark()
|
overridevirtual |
Reimplemented from PNS::ITEM.
Definition at line 174 of file pns_line.cpp.
References PNS::LINK_HOLDER::m_links, PNS::ITEM::m_marker, and Mark().
Referenced by Mark(), and PNS::SHOVE::onCollidingSolid().
◆ Marker()
|
overridevirtual |
Reimplemented from PNS::ITEM.
Definition at line 193 of file pns_line.cpp.
References PNS::LINK_HOLDER::m_links, PNS::ITEM::m_marker, and Marker().
Referenced by PNS::ARC::ARC(), Marker(), PNS::SHOVE::onCollidingLine(), PNS::SHOVE::onCollidingSolid(), PNS::SEGMENT::SEGMENT(), and PNS::SHOVE::shoveLineToHullSet().
◆ Net()
|
inlinevirtualinherited |
Reimplemented in PNS::HOLE, and PNS::JOINT.
Definition at line 210 of file pns_item.h.
References m_net.
Referenced by PNS::INDEX::Add(), PNS::NODE::Add(), PNS::NODE::addArc(), PNS::NODE::addSegment(), PNS::NODE::addSolid(), PNS::NODE::addVia(), PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::TOPOLOGY::AssembleDiffPair(), PNS::NODE::AssembleLine(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::LINE_PLACER::buildInitialLine(), PNS::KEEP_TOPOLOGY_CONSTRAINT::Check(), MOCK_RULE_RESOLVER::Clearance(), PNS_PCBNEW_RULE_RESOLVER::Clearance(), PNS::VIA::Clone(), collideSimple(), comparePnsItems(), PNS_KICAD_IFACE::createBoardItem(), PNS::DIFF_PAIR::DIFF_PAIR(), PNS_PCBNEW_RULE_RESOLVER::DpNetPair(), PNS::OPTIMIZER::fanoutCleanup(), PNS::DIFF_PAIR_PLACER::FindDpPrimitivePair(), PNS::NODE::FindJoint(), PNS::TOPOLOGY::findLinesFromVia(), PNS::NODE::findRedundantArc(), PNS::NODE::findRedundantSegment(), PNS::LINE_PLACER::FixRoute(), Format(), PNS::LOGGER::formatRouterItemAsJSON(), PNS_PCBNEW_RULE_RESOLVER::getBoardItem(), ROUTER_PREVIEW_ITEM::getLayerColor(), PNS_KICAD_IFACE_BASE::ImportSizes(), ROUTER_TOOL::InlineDrag(), PNS_PCBNEW_RULE_RESOLVER::IsNetTieExclusion(), PNS::ROUTER::isStartingPointRoutable(), PNS::LINE::LINE(), PNS::NODE::LockJoint(), PNS::VIA::MakeHandle(), TEMP_CLEARANCE_CACHE_KEY::makeSide(), PNS::LINE_PLACER::Move(), PNS::JOINT::NextSegment(), PNS::VIA::operator=(), PNS_PCBNEW_RULE_RESOLVER::QueryConstraint(), PNS::NODE::rebuildJoint(), PNS::INDEX::Remove(), PNS::NODE::removeArcIndex(), PNS::NODE::removeSegmentIndex(), PNS::NODE::removeSolidIndex(), PNS::NODE::removeViaIndex(), PNS::SHOVE::Run(), PNS::OPTIMIZER::runSmartPads(), PNS::SEGMENT::SEGMENT(), PNS::shouldWeConsiderHoleCollisions(), PNS::SHOVE::shoveIteration(), PNS::LINE_PLACER::Start(), PNS::DRAGGER::startDragArc(), PCB_TUNING_PATTERN::Update(), PNS::VIA::VIA(), and PNS::TOPOLOGY::walkTuningPath().
◆ OfKind()
|
inlineinherited |
- Returns
- true if the item's type matches the mask aKindMask.
Definition at line 181 of file pns_item.h.
References m_kind.
Referenced by RECOVERED_LAYER_IFACE::AddItem(), PNS::DP_PRIMITIVE_PAIR::anchorDirection(), PNS::TOPOLOGY::AssembleTrivialPath(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::ROUTER::BreakSegmentOrArc(), PNS::DP_GATEWAYS::BuildFromPrimitivePair(), PNS::ChangedArea(), PNS::TOOL_BASE::checkSnap(), PNS_KICAD_IFACE::DisplayItem(), PNS::OPTIMIZER::fanoutCleanup(), PNS::SHOVE::fixupViaCollisions(), PNS::TOPOLOGY::followTrivialPath(), PNS_KICAD_IFACE_BASE::GetLengthDelayCalculationItems(), PNS_VIEWER_IFACE::GetLengthDelayCalculationItems(), DIFF_PHASE_SKEW_TOOL::getNetPaths(), ROUTER_TOOL::InlineDrag(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), isHole(), isHole(), PNS::ROUTER::isStartingPointRoutable(), PNS::LINE_PLACER::Move(), PNS::JOINT::NextSegment(), PNS::SHOVE::onCollidingVia(), PNS::NODE::DEFAULT_OBSTACLE_VISITOR::operator()(), PCB_TUNING_PATTERN::recoverBaseline(), PNS_KICAD_IFACE::RemoveItem(), PNS_KICAD_IFACE_GENERATOR::RemoveItem(), PNS::SHOVE::replaceItems(), PNS::shouldWeConsiderHoleCollisions(), PNS::SHOVE::shoveIteration(), PNS::LINE_PLACER::simplifyNewLine(), PNS::LINE_PLACER::SplitAdjacentArcs(), PNS::LINE_PLACER::SplitAdjacentSegments(), PNS::DP_MEANDER_PLACER::Start(), PNS::MEANDER_PLACER::Start(), PNS::MEANDER_SKEW_PLACER::Start(), PNS::SHOVE::unwindLineStack(), and PNS::SHOVE::unwindLineStack().
◆ operator=() [1/2]
Definition at line 83 of file pns_line.cpp.
References PNS::OWNABLE_ITEM::BelongsTo(), PNS::VIA::Clone(), PNS::LINK_HOLDER::copyLinks(), LINE(), m_blockingObstacle, PNS::ITEM::m_layers, m_line, PNS::ITEM::m_marker, PNS::ITEM::m_movable, PNS::ITEM::m_net, PNS::OWNABLE_ITEM::m_owner, PNS::ITEM::m_parent, PNS::ITEM::m_rank, PNS::ITEM::m_routable, m_snapThreshhold, PNS::ITEM::m_sourceItem, m_via, m_width, and operator=().
Referenced by operator=(), and operator=().
◆ operator=() [2/2]
Definition at line 123 of file pns_line.cpp.
References LINE(), m_blockingObstacle, PNS::ITEM::m_layers, m_line, PNS::LINK_HOLDER::m_links, PNS::ITEM::m_marker, PNS::ITEM::m_movable, PNS::ITEM::m_net, PNS::OWNABLE_ITEM::m_owner, PNS::ITEM::m_parent, PNS::ITEM::m_rank, PNS::ITEM::m_routable, m_snapThreshhold, PNS::ITEM::m_sourceItem, m_via, m_width, and operator=().
◆ Owner()
|
inlineinherited |
Return the owner of this item, or NULL if there's none.
Definition at line 72 of file pns_item.h.
References m_owner.
Referenced by PNS_PCBNEW_RULE_RESOLVER::Clearance(), PNS_KICAD_IFACE_BASE::inheritTrackWidth(), PNS::LINE_PLACER::Move(), PNS::ITEM::OwningNode(), and PNS::NODE::Remove().
◆ OwningNode()
|
virtualinherited |
Definition at line 354 of file pns_item.cpp.
References PNS::OWNABLE_ITEM::Owner(), and ParentPadVia().
Referenced by PNS::SHOVE::shoveIteration().
◆ Parent()
|
inlineinherited |
Definition at line 199 of file pns_item.h.
References m_parent.
Referenced by PNS::TOPOLOGY::AssembleTuningPath(), PNS_KICAD_IFACE_BASE::CalculateRoutedPathDelay(), PNS_VIEWER_IFACE::CalculateRoutedPathDelay(), PNS_KICAD_IFACE_BASE::CalculateRoutedPathLength(), PNS_VIEWER_IFACE::CalculateRoutedPathLength(), PNS_KICAD_IFACE::createBoardItem(), PNS_KICAD_IFACE::DisplayItem(), PNS::TOPOLOGY::findLinesFromVia(), PNS_KICAD_IFACE::HideItem(), isCopper(), isCopper(), PNS_PCBNEW_RULE_RESOLVER::IsDrilledHole(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), PNS_KICAD_IFACE_BASE::IsFlashedOnLayer(), PNS_KICAD_IFACE::IsItemVisible(), PNS_PCBNEW_RULE_RESOLVER::IsKeepout(), PNS_PCBNEW_RULE_RESOLVER::IsNonPlatedSlot(), PNS_KICAD_IFACE::modifyBoardItem(), PNS::VIA::operator=(), refOfSolid(), PNS_KICAD_IFACE::RemoveItem(), PNS_KICAD_IFACE_GENERATOR::RemoveItem(), PNS::SHOVE::shoveIteration(), and PNS::LINE_PLACER::Start().
◆ ParentPadVia()
|
inlinevirtualinherited |
Reimplemented in PNS::HOLE.
Definition at line 293 of file pns_item.h.
References ITEM().
Referenced by PNS_PCBNEW_RULE_RESOLVER::IsDrilledHole(), IsFreePad(), PNS_PCBNEW_RULE_RESOLVER::IsNonPlatedSlot(), and OwningNode().
◆ PointCount()
|
inline |
Definition at line 145 of file pns_line.h.
References m_line.
Referenced by PNS::SHOVE::checkShoveDirection(), PNS::MULTI_DRAGGER::Drag(), PNS::OPTIMIZER::fanoutCleanup(), PNS::getDanglingAnchor(), HasLoops(), PNS::LINE_PLACER::Move(), PNS::TOPOLOGY::NearestUnconnectedAnchorPoint(), PNS::OPTIMIZER::removeCachedSegments(), PNS::WALKAROUND::Route(), PNS::SHOVE::Run(), PNS::SHOVE::ShoveObstacleLine(), PNS::TOPOLOGY::SimplifyLine(), PNS::LINE_PLACER::simplifyNewLine(), PNS::LINE_PLACER::splitHeadTail(), and PNS::DRAGGER::startDragArc().
◆ Rank()
|
overridevirtual |
Reimplemented from PNS::ITEM.
Definition at line 1401 of file pns_line.cpp.
References PNS::LINK_HOLDER::IsLinked(), PNS::LINK_HOLDER::m_links, PNS::ITEM::m_rank, and Rank().
Referenced by PNS::ARC::ARC(), PNS::SHOVE::onCollidingArc(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onReverseCollidingVia(), Rank(), PNS::SEGMENT::SEGMENT(), and PNS::SHOVE::shoveIteration().
◆ RelevantShapeLayers()
|
inherited |
Returns the set of layers on which either this or the other item can have a unique shape.
Use this to loop over layers when hit-testing objects that can have different shapes on each layer (currently only VIA)
Definition at line 83 of file pns_item.cpp.
References HasUniqueShapeLayers(), ITEM(), and UniqueShapeLayers().
Referenced by PNS::SHOVE::onCollidingVia(), PNS::SHOVE::onReverseCollidingVia(), PNS::DIFF_PAIR_PLACER::propagateDpHeadForces(), and PNS::VIA::PushoutForce().
◆ RemoveVia()
| void LINE::RemoveVia | ( | ) |
Definition at line 1597 of file pns_line.cpp.
References PNS::LINK_HOLDER::ContainsLink(), m_via, RemoveVia(), and PNS::LINK_HOLDER::Unlink().
Referenced by Clear(), ClipToNearestObstacle(), PNS::SHOVE::onReverseCollidingVia(), RemoveVia(), PNS::SHOVE::ShoveObstacleLine(), and PNS::LINE_PLACER::splitHeadTail().
◆ Reverse()
| void LINE::Reverse | ( | ) |
Clip the line to the nearest obstacle, traversing from the line's start vertex (0).
Returns the clipped line.
Definition at line 1358 of file pns_line.cpp.
References m_line, PNS::LINK_HOLDER::m_links, and Reverse().
Referenced by AppendVia(), PNS::DRAGGER::findViaFanoutByHandle(), PNS::TOPOLOGY::followBranch(), LinkVia(), Reverse(), and DIFF_PHASE_SKEW_TOOL::reversePath().
◆ SegmentCount()
|
inline |
Definition at line 144 of file pns_line.h.
References m_line.
Referenced by PNS::NODE::AssembleLine(), PNS::TOPOLOGY::AssembleTrivialPath(), PNS::TOPOLOGY::AssembleTuningPath(), PNS::MULTI_DRAGGER::Drag(), PNS::MULTI_DRAGGER::findNewLeaderSegment(), PNS::TOPOLOGY::followTrivialPath(), PNS::ROUTER::GetNearestRatnestAnchor(), DIFF_PHASE_SKEW_TOOL::getNetPaths(), PNS::OPTIMIZER::mergeStep(), PNS::LINE_PLACER::Move(), PNS::OPTIMIZER::Optimize(), PNS::LINE_PLACER::optimizeTailHeadTransition(), PNS::SHOVE::pushLineStack(), PNS::LINE_PLACER::removeLoops(), PNS::SHOVE::Run(), PNS::SHOVE::shoveIteration(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), PNS::TOPOLOGY::SimplifyLine(), and PNS::Tighten().
◆ SetBlockingObstacle()
|
inline |
Definition at line 234 of file pns_line.h.
References m_blockingObstacle.
◆ SetHole()
|
inlinevirtualinherited |
Reimplemented in PNS::SOLID, and PNS::VIA.
Definition at line 305 of file pns_item.h.
◆ SetIsCompoundShapePrimitive()
|
inlineinherited |
Definition at line 300 of file pns_item.h.
References m_isCompoundShapePrimitive.
◆ SetIsFreePad()
|
inlineinherited |
Definition at line 286 of file pns_item.h.
References m_isFreePad.
◆ SetLayer()
|
inlineinherited |
Definition at line 215 of file pns_item.h.
References m_layers.
Referenced by PNS::LINE_PLACER::buildInitialLine(), PNS::LINE_PLACER::FixRoute(), PNS_KICAD_IFACE_BASE::ImportSizes(), PNS::ROUTER::isStartingPointRoutable(), PNS::DIFF_PAIR_PLACER::propagateDpHeadForces(), PCB_TUNING_PATTERN::recoverBaseline(), and PNS::DIFF_PAIR::updateLine().
◆ SetLayers()
|
inlineinherited |
Definition at line 213 of file pns_item.h.
References m_layers.
Referenced by PNS::TOPOLOGY::AssembleDiffPair(), PNS::NODE::AssembleLine(), BOOST_FIXTURE_TEST_CASE(), BOOST_FIXTURE_TEST_CASE(), BOOST_FIXTURE_TEST_CASE(), BOOST_FIXTURE_TEST_CASE(), BOOST_FIXTURE_TEST_CASE(), PNS::HOLE::Clone(), PNS::VIA::Clone(), PNS::HOLE::MakeCircularHole(), PNS::VIA::operator=(), PNS_LOG_FILE::parseCommonPnsProps(), PNS_LOG_FILE::parseLegacyCommonPnsProps(), PNS::VIA::VIA(), and PNS::VIA::VIA().
◆ SetNet()
|
inlineinherited |
Definition at line 209 of file pns_item.h.
References m_net.
Referenced by PNS::NODE::AssembleLine(), BOOST_FIXTURE_TEST_CASE(), BOOST_FIXTURE_TEST_CASE(), PNS::LINE_PLACER::buildInitialLine(), PNS::VIA::Clone(), PCB_TUNING_PATTERN::EditStart(), PNS::LINE_PLACER::FixRoute(), PNS_KICAD_IFACE_BASE::ImportSizes(), PNS::ROUTER::isStartingPointRoutable(), PNS::LINE_PLACER::Move(), PNS::VIA::operator=(), PNS_LOG_FILE::parseCommonPnsProps(), PNS_LOG_FILE::parseLegacyCommonPnsProps(), PCB_TUNING_PATTERN::recoverBaseline(), PNS::DIFF_PAIR::updateLine(), PNS::VIA::VIA(), and PNS::VIA::VIA().
◆ SetOwner()
|
inlineinherited |
Set the node that owns this item.
An item can belong to a single NODE or be unowned.
Definition at line 77 of file pns_item.h.
References m_owner.
Referenced by PNS::ITEM_SET::Add(), PNS::NODE::addArc(), PNS::NODE::addHole(), PNS::NODE::addSegment(), PNS::NODE::addSolid(), PNS::NODE::addVia(), PNS::NODE::AssembleLine(), PNS::HOLE::Clone(), PNS::NODE::Commit(), PNS::NODE::doRemove(), PNS::ITEM_SET::Prepend(), PNS::NODE::Remove(), and PNS::NODE::Remove().
◆ SetParent()
|
inlineinherited |
Definition at line 191 of file pns_item.h.
References m_parent, and m_sourceItem.
Referenced by PNS_KICAD_IFACE::AddItem(), PNS_KICAD_IFACE_GENERATOR::AddItem(), PNS::NODE::AssembleLine(), PCB_TUNING_PATTERN::EditStart(), PNS::VIA::operator=(), and PNS::DIFF_PAIR::updateLine().
◆ SetRank()
|
overridevirtual |
Reimplemented from PNS::ITEM.
Definition at line 1391 of file pns_line.cpp.
References PNS::LINK_HOLDER::m_links, PNS::ITEM::m_rank, and SetRank().
Referenced by PNS::SHOVE::onCollidingArc(), PNS::SHOVE::onCollidingLine(), PNS::SHOVE::onCollidingSegment(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onReverseCollidingVia(), PNS::SHOVE::Run(), and SetRank().
◆ SetRoutable()
|
inlineinherited |
Definition at line 283 of file pns_item.h.
References m_routable.
Referenced by BOOST_FIXTURE_TEST_CASE().
◆ SetShape()
|
inline |
Return the shape of the line.
Definition at line 131 of file pns_line.h.
References m_line, and m_width.
Referenced by PNS::LINE_PLACER::buildInitialLine(), PNS::clipToOtherLine(), PNS::OPTIMIZER::fanoutCleanup(), PNS::ROUTER::isStartingPointRoutable(), PNS::OPTIMIZER::mergeFull(), PNS::SHOVE::onReverseCollidingVia(), PNS::SHOVE::preShoveCleanup(), PNS::LINE_PLACER::rhWalkBase(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::TOPOLOGY::SimplifyLine(), PNS::LINE_PLACER::simplifyNewLine(), PNS::OPTIMIZER::smartPadsSingle(), PNS::LINE_PLACER::splitHeadTail(), PNS::tightenSegment(), PNS::LINE_PLACER::Trace(), and PNS::DIFF_PAIR::updateLine().
◆ SetSnapThreshhold()
|
inline |
Definition at line 252 of file pns_line.h.
References m_snapThreshhold.
Referenced by PNS::DRAGGER::dragMarkObstacles(), PNS::DRAGGER::dragShove(), and PNS::DRAGGER::dragWalkaround().
◆ SetSourceItem()
|
inlineinherited |
Definition at line 201 of file pns_item.h.
References m_sourceItem.
Referenced by PNS::NODE::AssembleLine(), PNS::VIA::operator=(), and PNS::DIFF_PAIR::updateLine().
◆ SetViaDiameter()
|
inline |
Definition at line 206 of file pns_line.h.
References PNS::VIA::ALL_LAYERS, m_via, and PNS::VIA::NORMAL.
◆ SetViaDrill()
|
inline |
Definition at line 215 of file pns_line.h.
References m_via.
◆ SetWidth()
|
inline |
Return line width.
Definition at line 155 of file pns_line.h.
References m_line, and m_width.
Referenced by PNS::NODE::AssembleLine(), BOOST_AUTO_TEST_CASE(), BOOST_AUTO_TEST_CASE(), PNS::ROUTER::isStartingPointRoutable(), PCB_TUNING_PATTERN::recoverBaseline(), and PNS::DIFF_PAIR::updateLine().
◆ Shape()
|
inlineoverridevirtual |
Modifiable accessor to the underlying shape.
Reimplemented from PNS::ITEM.
Definition at line 138 of file pns_line.h.
References m_line.
Referenced by PNS::SHOVE::onCollidingVia().
◆ ShapeCount()
|
inline |
Return the aIdx-th point of the line.
Definition at line 147 of file pns_line.h.
References m_line.
Referenced by IsLinkedChecked().
◆ ShowLinks()
| void PNS::LINE::ShowLinks | ( | ) | const |
◆ snapDraggedCorner()
|
private |
Definition at line 1095 of file pns_line.cpp.
References SHAPE_LINE_CHAIN::CSegment(), SEG::IntersectLines(), m_snapThreshhold, SHAPE_LINE_CHAIN::SegmentCount(), and snapDraggedCorner().
Referenced by dragCorner45(), and snapDraggedCorner().
◆ snapToNeighbourSegments()
|
private |
Definition at line 1137 of file pns_line.cpp.
References SEG::A, SHAPE_LINE_CHAIN::CSegment(), SEG::LineDistance(), m_snapThreshhold, SHAPE_LINE_CHAIN::SegmentCount(), and snapToNeighbourSegments().
Referenced by dragSegment45(), and snapToNeighbourSegments().
◆ UniqueShapeLayers()
|
inlinevirtualinherited |
Return a list of layers that have unique (potentially different) shapes.
Reimplemented in PNS::VIA.
Definition at line 250 of file pns_item.h.
Referenced by RelevantShapeLayers().
◆ Unlink()
|
inlineinherited |
Return the list of links from the owning node that constitute this line (or NULL if the line is not linked).
Definition at line 57 of file pns_link_holder.h.
References alg::contains(), and m_links.
Referenced by PNS::LINE::RemoveVia(), and PNS::SHOVE::replaceLine().
◆ Unmark()
|
overridevirtual |
Reimplemented from PNS::ITEM.
Definition at line 184 of file pns_line.cpp.
References PNS::LINK_HOLDER::m_links, PNS::ITEM::m_marker, and Unmark().
Referenced by PNS::COMPONENT_DRAGGER::Drag(), PNS::DRAGGER::dragShove(), PNS::SHOVE::onCollidingSolid(), PNS::DRAGGER::optimizeAndUpdateDraggedLine(), and Unmark().
◆ Via() [1/2]
|
inline |
Definition at line 203 of file pns_line.h.
References m_via.
Referenced by PNS::NODE::CheckColliding(), PNS::SHOVE::checkShoveDirection(), PNS::LINE_PLACER::FixRoute(), PNS::ROUTER::markViolations(), PNS::ROUTER::movePlacing(), PNS::NODE::NearestObstacle(), PNS::SHOVE::onCollidingSolid(), PNS::SHOVE::onCollidingVia(), PNS::SHOVE::onReverseCollidingVia(), PNS::LINE_PLACER::rhShoveOnly(), PNS::LINE_PLACER::rhWalkBase(), PNS::WALKAROUND::Route(), PNS::SHOVE::Run(), PNS::SHOVE::shoveIteration(), PNS::SHOVE::shoveLineFromLoneVia(), and PNS::SHOVE::ShoveObstacleLine().
◆ Via() [2/2]
|
inline |
Definition at line 204 of file pns_line.h.
References m_via.
◆ Walkaround() [1/2]
| bool LINE::Walkaround | ( | const SHAPE_LINE_CHAIN & | aObstacle, |
| SHAPE_LINE_CHAIN & | aPath, | ||
| bool | aCw ) const |
Print out all linked segments.
Definition at line 254 of file pns_line.cpp.
References SHAPE_LINE_CHAIN::Append(), PNS::areNeighbours(), CLastPoint(), CLine(), SHAPE_LINE_CHAIN::CPoint(), SHAPE_LINE_CHAIN::Find(), findVertex(), PNS::HullIntersection(), SEG::NearestPoint(), OUTSIDE, SHAPE_LINE_CHAIN::PointCount(), SHAPE_LINE_CHAIN::PointInside(), SHAPE_LINE_CHAIN_BASE::PointOnEdge(), SHAPE_LINE_CHAIN::Reverse(), SHAPE_LINE_CHAIN::SegmentCount(), SHAPE_LINE_CHAIN::Split(), and Walkaround().
◆ Walkaround() [2/2]
| bool PNS::LINE::Walkaround | ( | SHAPE_LINE_CHAIN | aObstacle, |
| SHAPE_LINE_CHAIN & | aPre, | ||
| SHAPE_LINE_CHAIN & | aWalk, | ||
| SHAPE_LINE_CHAIN & | aPost, | ||
| bool | aCw ) const |
Calculate a line tightly wrapping a convex hull of an obstacle object (aObstacle).
- Parameters
-
aPrePath is the path from origin to the obstacle. aWalkaroundPath is the path around the obstacle. aPostPath is the path from obstacle till the end. aCW determines whether to walk around in clockwise or counter-clockwise direction.
Referenced by PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), and Walkaround().
◆ Width()
|
inline |
Return true if the line is geometrically identical as line aOther.
Definition at line 162 of file pns_line.h.
References m_width.
Referenced by PNS::TOPOLOGY::AssembleDiffPair(), ChangedArea(), PNS::OPTIMIZER::fanoutCleanup(), PNS::LINE_PLACER::FixRoute(), PNS::NODE::NearestObstacle(), PNS::SHOVE::onCollidingVia(), PNS::SHOVE::onReverseCollidingVia(), PNS::SHOVE::shoveIteration(), PNS::SHOVE::shoveLineFromLoneVia(), PNS::SHOVE::shoveLineToHullSet(), PNS::SHOVE::ShoveObstacleLine(), and PNS::OPTIMIZER::smartPadsSingle().
Member Data Documentation
◆ m_blockingObstacle
|
private |
For mark obstacle mode.
Definition at line 281 of file pns_line.h.
Referenced by GetBlockingObstacle(), LINE(), LINE(), LINE(), operator=(), operator=(), and SetBlockingObstacle().
◆ m_isCompoundShapePrimitive
|
protectedinherited |
Definition at line 332 of file pns_item.h.
Referenced by IsCompoundShapePrimitive(), ITEM(), ITEM(), and SetIsCompoundShapePrimitive().
◆ m_isFreePad
|
protectedinherited |
Definition at line 331 of file pns_item.h.
Referenced by IsFreePad(), ITEM(), ITEM(), and SetIsFreePad().
◆ m_isVirtual
|
protectedinherited |
Definition at line 330 of file pns_item.h.
Referenced by PNS::HOLE::Clone(), PNS::VIA::Clone(), IsVirtual(), ITEM(), ITEM(), PNS::VIA::operator=(), PNS::VIA::VIA(), PNS::VIA::VIA(), PNS::VIA::VIA(), and PNS::VVIA::VVIA().
◆ m_kind
|
protectedinherited |
Definition at line 316 of file pns_item.h.
Referenced by collideSimple(), ITEM(), ITEM(), Kind(), KindStr(), and OfKind().
◆ m_layers
|
protectedinherited |
Definition at line 323 of file pns_item.h.
Referenced by PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::ARC::Clone(), PNS::SEGMENT::Clone(), collideSimple(), PNS::VIA::ConnectsLayer(), PNS::JOINT::Dump(), PNS::VIA::EffectiveLayer(), Format(), ITEM(), PNS::JOINT::JOINT(), PNS::JOINT::JOINT(), Layers(), PNS::LINE::LINE(), PNS::LINE::LINE(), PNS::LINE::LINE(), PNS::JOINT::Merge(), PNS::DIFF_PAIR::operator=(), PNS::DIFF_PAIR::operator=(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::JOINT::Overlaps(), PNS::SEGMENT::SEGMENT(), PNS::SOLID::SetHole(), SetLayer(), SetLayers(), PNS::VIA::SetStackMode(), PNS::VIA::UniqueShapeLayers(), and PNS::JOINT::Unlink().
◆ m_line
|
private |
The actual shape of the line.
Definition at line 274 of file pns_line.h.
Referenced by Anchor(), AnchorCount(), AppendVia(), ArcCount(), ChangedArea(), CLastPoint(), Clear(), CLine(), ClipVertexRange(), CompareGeometry(), CountCorners(), CPoint(), CSegment(), DragArc(), dragCorner45(), dragCornerFree(), dragSegment45(), FindSegment(), LINE(), LINE(), Line(), LinkVia(), operator=(), operator=(), PointCount(), Reverse(), SegmentCount(), SetShape(), SetWidth(), Shape(), and ShapeCount().
◆ m_links
|
protectedinherited |
Definition at line 125 of file pns_link_holder.h.
Referenced by PNS::DIFF_PAIR::ClearLinks(), ClearLinks(), PNS::LINE::ClipVertexRange(), ContainsLink(), copyLinks(), GetLink(), PNS::LINE::HasLockedSegments(), IsLinked(), Link(), LinkCount(), Links(), Links(), PNS::LINE::Mark(), PNS::LINE::Marker(), PNS::LINE::operator=(), PNS::LINE::Rank(), PNS::LINE::Reverse(), PNS::LINE::SetRank(), ShowLinks(), Unlink(), and PNS::LINE::Unmark().
◆ m_marker
|
mutableprotectedinherited |
Definition at line 327 of file pns_item.h.
Referenced by PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::ARC::Clone(), PNS::HOLE::Clone(), PNS::SEGMENT::Clone(), PNS::VIA::Clone(), ITEM(), ITEM(), Mark(), PNS::LINE::Mark(), Marker(), PNS::LINE::Marker(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), PNS::VIA::operator=(), PNS::SEGMENT::SEGMENT(), Unmark(), PNS::LINE::Unmark(), and PNS::VIA::VIA().
◆ m_movable
|
protectedinherited |
Definition at line 325 of file pns_item.h.
Referenced by PNS::ARC::Clone(), PNS::VIA::Clone(), ITEM(), ITEM(), PNS::LINE::LINE(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), PNS::VIA::operator=(), and PNS::SOLID::SOLID().
◆ m_net
|
protectedinherited |
Definition at line 326 of file pns_item.h.
Referenced by PNS::LINE::AppendVia(), PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::ARC::Clone(), PNS::SEGMENT::Clone(), ITEM(), ITEM(), PNS::LINE::LINE(), PNS::LINE::LINE(), PNS::LINE::LINE(), PNS::HOLE::Net(), Net(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SEGMENT::SEGMENT(), PNS::SEGMENT::SEGMENT(), PNS::SEGMENT::SEGMENT(), and SetNet().
◆ m_owner
|
protectedinherited |
Definition at line 88 of file pns_item.h.
Referenced by BelongsTo(), PNS::ITEM::ITEM(), PNS::ITEM::ITEM(), PNS::LINE::operator=(), PNS::LINE::operator=(), OWNABLE_ITEM(), Owner(), and SetOwner().
◆ m_parent
|
protectedinherited |
Definition at line 317 of file pns_item.h.
Referenced by PNS::HOLE::BoardItem(), BoardItem(), PNS::ARC::Clone(), PNS::HOLE::Clone(), PNS::VIA::Clone(), collideSimple(), ITEM(), ITEM(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), Parent(), PNS::SEGMENT::SEGMENT(), SetParent(), and PNS::DIFF_PAIR::updateLine().
◆ m_rank
|
protectedinherited |
Definition at line 328 of file pns_item.h.
Referenced by PNS::ARC::ARC(), PNS::ARC::ARC(), PNS::ARC::Clone(), PNS::HOLE::Clone(), PNS::SEGMENT::Clone(), PNS::VIA::Clone(), ITEM(), ITEM(), PNS::LINE::LINE(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), PNS::VIA::operator=(), Rank(), PNS::LINE::Rank(), PNS::SEGMENT::SEGMENT(), SetRank(), PNS::LINE::SetRank(), and PNS::VIA::VIA().
◆ m_routable
|
protectedinherited |
Definition at line 329 of file pns_item.h.
Referenced by PNS::ARC::Clone(), PNS::VIA::Clone(), IsRoutable(), ITEM(), ITEM(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), PNS::VIA::operator=(), and SetRoutable().
◆ m_snapThreshhold
|
private |
Width to smooth out jagged segments.
Definition at line 278 of file pns_line.h.
Referenced by GetSnapThreshhold(), LINE(), LINE(), LINE(), LINE(), operator=(), operator=(), SetSnapThreshhold(), snapDraggedCorner(), and snapToNeighbourSegments().
◆ m_sourceItem
|
protectedinherited |
Definition at line 319 of file pns_item.h.
Referenced by PNS::ARC::Clone(), PNS::VIA::Clone(), GetSourceItem(), ITEM(), ITEM(), PNS::LINE::operator=(), PNS::LINE::operator=(), PNS::SOLID::operator=(), PNS::SEGMENT::SEGMENT(), SetParent(), SetSourceItem(), and PNS::DIFF_PAIR::updateLine().
◆ m_via
|
private |
Definition at line 280 of file pns_line.h.
Referenced by AppendVia(), EndsWithVia(), LINE(), LINE(), LINE(), LINE(), LinkVia(), operator=(), operator=(), RemoveVia(), SetViaDiameter(), SetViaDrill(), Via(), Via(), and ~LINE().
◆ m_width
|
private |
Our width.
Definition at line 275 of file pns_line.h.
Referenced by LINE(), LINE(), LINE(), LINE(), operator=(), operator=(), SetShape(), SetWidth(), and Width().
The documentation for this class was generated from the following files: